Nye piezoelektriske aktuatorer giver forbedret haptisk feedback til bærbare touchskærmdesign
Bidraget af DigiKeys nordamerikanske redaktører
2020-02-13
Brugerinterfaces til touchskærme bliver stadig mere almindelige på grund af deres klare fordele i forhold til mekaniske interfaces. For forbrugere er interfacet velfungerende og intuitivt, og for industribrugere undgår man med et forseglet display problemer med indtrængen af snavs og fugt. Men der er ulemper for begge typer brugere. Eksempelvis kan forbrugere savne den bekvemmelighed og tilfredsstillelse, der er ved at trykke på en mekanisk kontakt, mens industribrugere kan have besvær med at trykke på en knap på touchskærmen, hvis de har handsker på.
Haptisk feedback, hvor et tryk på en knap indikeres med vibration, er blevet anvendt til at give en bedre fornemmelse ved brug af touchskærme, men eksisterende løsninger anvender ofte pladskrævende og komplekse mekaniske systemer. Disse inkluderer ERM-vibrationsmotorer (excentrisk roterende masse) og LRA-motorer (lineær resonansaktuator). Piezoelektrisk haptisk feedback er et mere kompakt og fleksibelt alternativ. Indtil for nylig gjorde behovet for høj driftsspænding det dog svært at bruge løsningen i enheder med lavt effektforbrug – et afgørende krav i batteridrevne slutprodukter.
Dog har fremskridt inden for piezoelektriske haptiske løsninger med "høj opløsning" ikke blot taget hånd om problemerne vedrørende effektforbrug, men har også medført andre fordele ved design med haptisk interface, f.eks. en kompakt formfaktor med lavprofil, kraftig feedback og hurtig responstid.
I denne artikel kastes der lys over fordelene ved nye piezoelektriske haptiske aktuatorer i forhold til brugen af ERM- og LRA-motorer, hvorefter der præsenteres en ny generation af enheder, som er baseret på flerlagsstrukturer og topolede driftstilstande, som – sammen med effektive og dedikerede drivere – løser tidligere problemer vedrørende effektforbrug. Artiklen viser dernæst ved hjælp af eksempler på haptisk feedback fra TDK og drivere fra Boréas Technologies og Texas Instruments (TI), hvordan en ingeniør kan benytte sig af disse aktuatorer og drivere i sit næste produkt med touchskærm og haptisk feedback.
Alternativer til haptisk feedback
Designere, der ønsker at tilføje haptisk feedback i deres touchskærminterface, har tre muligheder at vælge mellem: ERM-motorer, LRA-motorer og piezoelektriske aktuatorer. Alle tre fungerer ud fra det samme grundlæggende princip, hvor en mikrocontroller overvåger betjeningen, og en driver styrer en aktuator, som genererer vibration (figur 1). Forskellene ligger i, hvordan denne vibration skabes: ERM benytter en acentrisk roterende vægt, LRA benytter en magnetisk vægt ophængt i spolefjedre, og den piezoelektriske enhed benytter sig af den (omvendte) piezoelektriske effekt, som forårsager en ændring i dimensionerne af et krystalobjekt eller keramisk objekt, når det udsættes for et elektrisk felt.
 Figur 1: Systemer med haptisk touchskærm indeholder en mikrocontroller, driver og aktuator. I dette eksempel er aktuatoren en piezoelektrisk enhed, men ERM- og LRA-motorer er populære alternativer. (Billedkilde: Boréas Technologies)
Figur 1: Systemer med haptisk touchskærm indeholder en mikrocontroller, driver og aktuator. I dette eksempel er aktuatoren en piezoelektrisk enhed, men ERM- og LRA-motorer er populære alternativer. (Billedkilde: Boréas Technologies)
ERM- og LRA-motorer har været populære i design af bærbare enheder, primært fordi de kan drives af lav spænding (cirka 3 volt) og blot kræver et simpelt driverdesign. Konventionelle piezoelektriske enheder kræver derimod meget højere spændinger (op til 200 volt) for at generere tilstrækkelig mekanisk deformation til at skabe en god forbrugeroplevelse. Disse høje spændinger er nødvendige, fordi konventionel haptisk driverteknologi typisk er baseret på nedskaleret audioforstærkerteknologi, som ikke er blevet designet fra bunden med lav effekt in mente. Endnu en designmæssig udfordring har været manglen på dedikerede drivere til haptiske aktuatorer med lavt effektforbrug, hvilket har tvunget designere til at ty til mindre effektive løsninger.
Dog er en af de centrale fordele ved piezoelektriske løsninger, at de understøtter haptik i meget høj opløsning, som forbedrer feedback til mere end blot simpel monoton vibration. Eksempelvis kan piezoelektriske aktuatorer frembringe vibrationer, som varierer i frekvens og amplitude, og kan bruges til at tilkendegive forskellige følgevirkninger af tryk på en enkelt knap (figur 2).
") Figur 2: Piezoelektriske haptiske aktuatorer giver mulighed for en række forskellige vibrationer, som kan bruges til at indikere forskellige følgevirkninger af at aktivere den samme knap. (Billedkilde: Boréas Technologies)
Figur 2: Piezoelektriske haptiske aktuatorer giver mulighed for en række forskellige vibrationer, som kan bruges til at indikere forskellige følgevirkninger af at aktivere den samme knap. (Billedkilde: Boréas Technologies)
Kort sagt kræver løsninger med haptisk feedback med høj opløsning:
- Stor båndbredde: for at muliggøre en bred vifte af vibrationsfrekvenser og -tilstande
- Høj acceleration [g]: for kraftigere feedback
- Stor forskydning: øger følsomheden for haptisk feedback
- Lav latenstid: hurtig responstid øger feedbackniveauet
Tabel 1 opsummerer ydeevnen for hver af løsningerne til haptisk feedback og demonstrerer, at piezoelektriske løsninger er den eneste valgmulighed til anvendelser med høj opløsning, fordi de giver mulighed for den nødvendige kombination af båndbredde, feedbackstyrke og følsomhed samt latenstid.
|
Tabel 1: Sammenligning af driftskarakteristikker for løsninger til haptisk feedback. Piezoelektriske enheder giver den gode acceleration (målt i "g", hvor 1 g er tyngdeaccelerationen, dvs. accelerationen på grund af tyngdekraften målt ved havoverfladen (9,81 m/s2)), forskydning og responstid samt tilpassede bølgeformer, der kræves for at give haptisk feedback med høj opløsning. (Billedkilde: DigiKey, via forfatter)
Bemærk, at en del af den ekstra driverkompleksitet ved piezoelektriske aktuatorer kommer af den yderligere funktionalitet, der er nødvendig for at generere de brugerdefinerede bølgeformer, der giver den haptiske feedback opløsning og kontekst. ERM og LRA kan ikke understøtte brugerdefinerede bølgeformer, og derfor er driverne mere simple.
Fordele ved nye piezoelektriske enheder til haptisk feedback
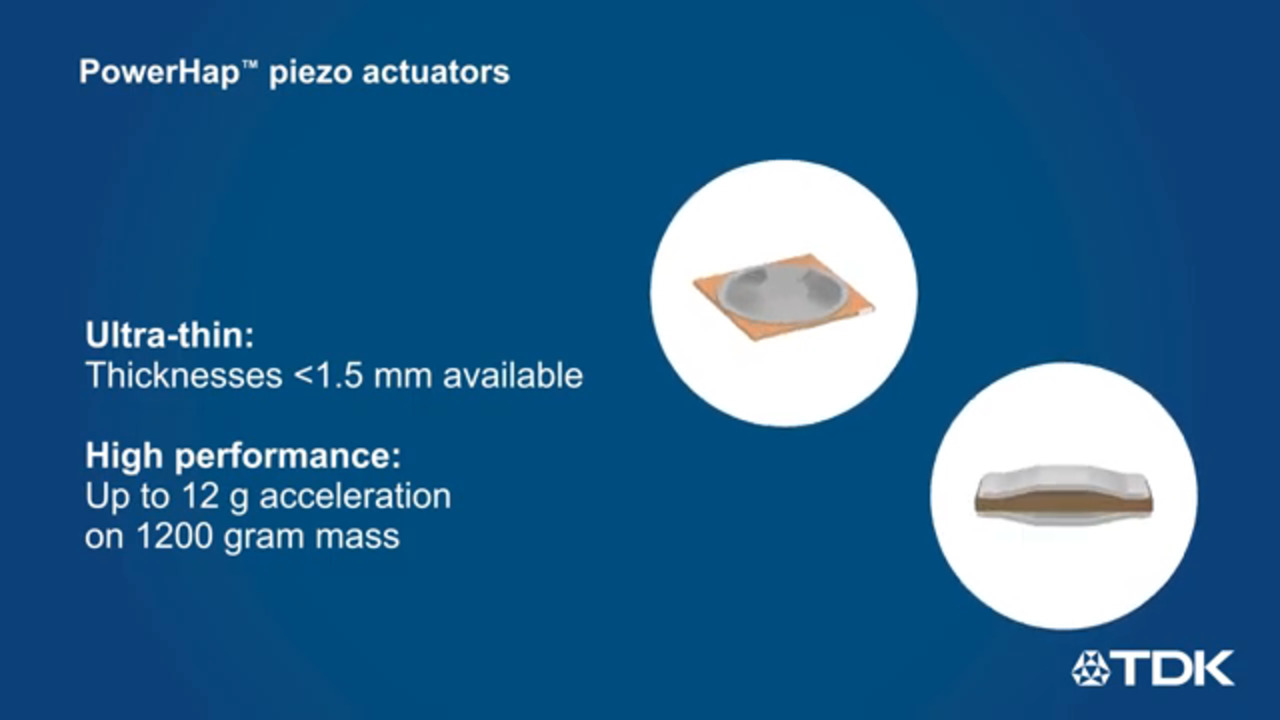
Nylige produktlanceringer til både piezoelektriske aktuatorer og effektive, dedikerede drivere har gjort disse teknologier til en meget bedre løsning til batteridrevne produkter. For eksempel er nyligt lancerede piezoelektriske haptiske produkter såsom TDK's PowerHap B54102H1020A001 (12,7 mm2 areal) og B54101H1020A001 (26 mm2) mindre end 2,5 mm høje og anvender en flerlagsstruktur i stedet for det enkeltlag, som anvendes af enheder, der er baseret på audioforstærkerteknologi. Denne flerlagsstruktur mindsker i nogen grad kravene til driveren ved at sænke styrespændingen (til mellem 60 og 120 volt).
Hvert lag i TDK's flerlagsprodukt udvides kun en smule i "z"-retningen grundet den omvendte piezoelektriske effekt. Men fordi den piezoelektriske enhed skal opretholde en konstant volumen, trækker lagene sig simultant sammen i "x"- og "y"-dimensionen.
TDK-produktet forstærker denne sammentrækning mekanisk ved hjælp af et par bækkener i hver ende af den piezoelektriske enhed for at øge bevægelsen på z-aksen med en faktor på 15, så der opnås en forskydning på mellem 35 og 65 mikrometer (µm) afhængigt af modellen (figur 3). Ved en belastning på 100 gram (g) (enpolet drift, enkeltimpuls sinusbølge, 200 Hz) opnår den større TDK-aktuator en acceleration på 30 g spids-til-spids efter blot 1 ms. Frekvensområdet på 1 til 1000 Hz giver designere mulighed for at specialudvikle profiler for haptisk feedback med høj opløsning.
 Figur 3: TDK's piezoelektriske haptiske aktuatorer benytter en struktur med flere lag og bækkener til at forstærke bevægelsen på z-aksen. (Billedkilde: TDK)
Figur 3: TDK's piezoelektriske haptiske aktuatorer benytter en struktur med flere lag og bækkener til at forstærke bevægelsen på z-aksen. (Billedkilde: TDK)
TDK's piezoelektriske haptiske aktuatorer kan fungere enten i enpolet eller topolet tilstand. Enpolet drift sætter en positiv gennemgangsspænding i aktuatoren, mens topolet drift varierer spændingen mellem de positive og negative spidsværdier. Fordelen ved topolet drift er, at der kan opnås større forskydning med den samme spids-til-spids-spænding, eller der kan opnås den samme forskydning med en lavere spids-til-spids-spænding. Ulempen er, at topolet drift øger aktuatorens mekaniske og elektriske belastninger (figur 4).
 offers the same mechanical displacement as unipolar") Figur 4: Topolet drift (højre) giver mulighed for den samme mekaniske forskydning som enpolet, men ved hjælp af en lavere spids-til-spids-spænding. (Billedkilde: TDK)
Figur 4: Topolet drift (højre) giver mulighed for den samme mekaniske forskydning som enpolet, men ved hjælp af en lavere spids-til-spids-spænding. (Billedkilde: TDK)
Siliciumleverandører har også for nylig løftet sløret for driverchips, som er designet specifikt til anvendelser med haptisk feedback. Disse forbedrede design kan frembringe en vifte af vibrationstilstande over et stort frekvensområde og give mulighed for enpolet eller topolet driftskarakteristik, mens de fungerer med meget højere effektivitet end tidligere design. Eksempler omfatter Boréas Technologies' BOS1901CQT piezo-haptiske driver og Texas Instruments' DRV2667 motoreffektdriver.
Boréas Technologies' IC er en enkeltchip-driver til piezoaktuatorer, der inkorporerer teknologi til energigenindvinding og er i stand til at generere adskillige forskellige vibrationssignaler. Chippen kan drive aktuatorer med op til 190 voltspids-spids fra en forsyning på 3 til 5,5 volt. BOS1901 anvender et højhastigheds-SPI (serial peripheral interface), og alle indstillinger kan indstilles via den digitale front-end. Dens typiske opstartstid på mindre end 300 mikrosekunder (μs) er ensbetydende med lav latenstid.
TI-chippen er en piezoelektrisk haptisk driver med en integreret 105-volts boost-kontakt og digital front-end, som er i stand til at drive aktuatorer med både høj og lav spænding. Den digitale front-end aflaster mikroprocessoren, som slipper for byrden ved PWM-generering (pulsbreddemodulation) eller behovet yderligere analoge kanaler i værtssystemet. Chippen har dedikeret hukommelse til at lagre og hente bølgeformer samt en avanceret bølgeform-synthesizer. En typisk opstartstid på 2 ms begrænser latenstiden, og termisk overbelastningssikring forhindrer enheden i at blive beskadiget ved overanstrengelse.
Piezo-haptisk systemdesign
Både Boréas- og TI-chippen er designet til at fungere i et system med touchskærm, som allerede omfatter en applikationsprocessor. Processoren udløser udførelsen af den haptiske feedback via et SPI. Alternativt kan designeren bruge et analogt input til at udløse haptiske effekter (figur 5).
 Figur 5: Applikationskredsløb der viser TI DRV2667 motoreffektdriver. Haptiske hændelser udløses af touchskærmens applikationsprocessor, hvor TI-chippen så driver den piezoelektriske haptiske enhed. (Billedkilde: Texas Instruments)
Figur 5: Applikationskredsløb der viser TI DRV2667 motoreffektdriver. Haptiske hændelser udløses af touchskærmens applikationsprocessor, hvor TI-chippen så driver den piezoelektriske haptiske enhed. (Billedkilde: Texas Instruments)
På grund af niveauet af integration i de seneste drivere, er designet af touchskærmsystemer med piezoelektrisk haptisk feedback blevet gjort nemmere, men nogle komponentvalg er vigtige for at optimere designets ydeevne. For eksempel skal boost-spændingen (BST) være 5 volt højere end spidsspændingen, som piezoaktuatoren udsættes for. Dette giver mulighed for en vis grad af spillerum for forstærkeren og indstilles ved hjælp af modstandsdelernetværket R1/R2, som er vist i figur 5.
Formlen til beregning af modstandsværdierne er: V(BST) = V(FB) x (1 + R1/R2), hvor V(FB) = 1,32 volt.
Så for eksempelvis at opnå TI-driverens maksimale V(BST) kapacitet på 105 volt, kunne værdierne for R1 og R2 være henholdsvis 768 kiloohm (kΩ) og 9,76 kΩ.
Spids-boost-strømstyrken trækkes gennem forsyningen via induktionsspole L1. Denne strømstyrke bestemmes af R(EXT), men der skal udvises forsigtighed i udvælgelsen af en induktionsspole, der kan klare den programmerede strømstyrkegrænse (ILIM). Forholdet mellem R(EXT) og ILIM bestemmes af formlen:
![]()
Hvor K = 10.500, VREF = 1,35 volt, RINT (driverens indre modstand) = 60 Ω og ILIM = spidsstrømstyrkegrænsen for L1.
Valget af induktionsspole er vigtigt for at sikre den bedste ydeevne fra driveren. For TI-chippen ligger den anbefalede induktans mellem 3,3 og 22 mikrohenry (μH). Afvejningen er, om man skal vælge en højere induktans for at mindske boost-konverterens omkoblingstab eller en lavere induktans for at maksimere dens udgangsstrømstyrke.
De afgørende elektriske specifikationer for den piezo-haptiske aktuator ud fra et driverperspektiv er spændingsklasse og kapacitans. Eksempelvis er enheden ved TI-driverens maksimumfrekvens på 500 Hz maksimeret til at drive op til 50 nanofarad (nF) ved 200 voltspids-til-spids (det højeste spændingsudsving, driveren kan håndtere). Chippen kan drive større kapacitanser, hvis den programmerede boost-spænding sænkes, og/eller brugeren begrænser inputfrekvensområdet til 300 Hz, for eksempel.
Et andet vigtigt komponentvalg er boost-kondensatoren (C(BST)). Kondensatoren skal som minimum have samme spændingsklasse som boost-spændingen og helst højere. Eksempelvis anbefales en 100 nF kondensator, som er klassificeret til 250 volt, af typen X5R eller X7R, når der køres ved TI-chippens maksimale boost-spænding på 105 volt. C(BST) skal have en driftskapacitans på mindst 50 nF. For V(BST) fra 30 til 80 volt er en 100 nF kondensator klassificeret til 100 volt acceptabel, og for V(BST) på mindre end 30 volt anbefales en 50-volts kondensator på 0,22 mikrofarad (μF).
Det anbefales at bruge en bulk-kondensator (CBULK), som anbringes ved siden af induktionsspolen, grundet afbryderstiftens strømstyrkekrav. Det anbefales at bruge en keramisk kondensator af X5R- eller X7R-typen med en kapacitans på mindst 1 μF.
Udviklingsværktøjer
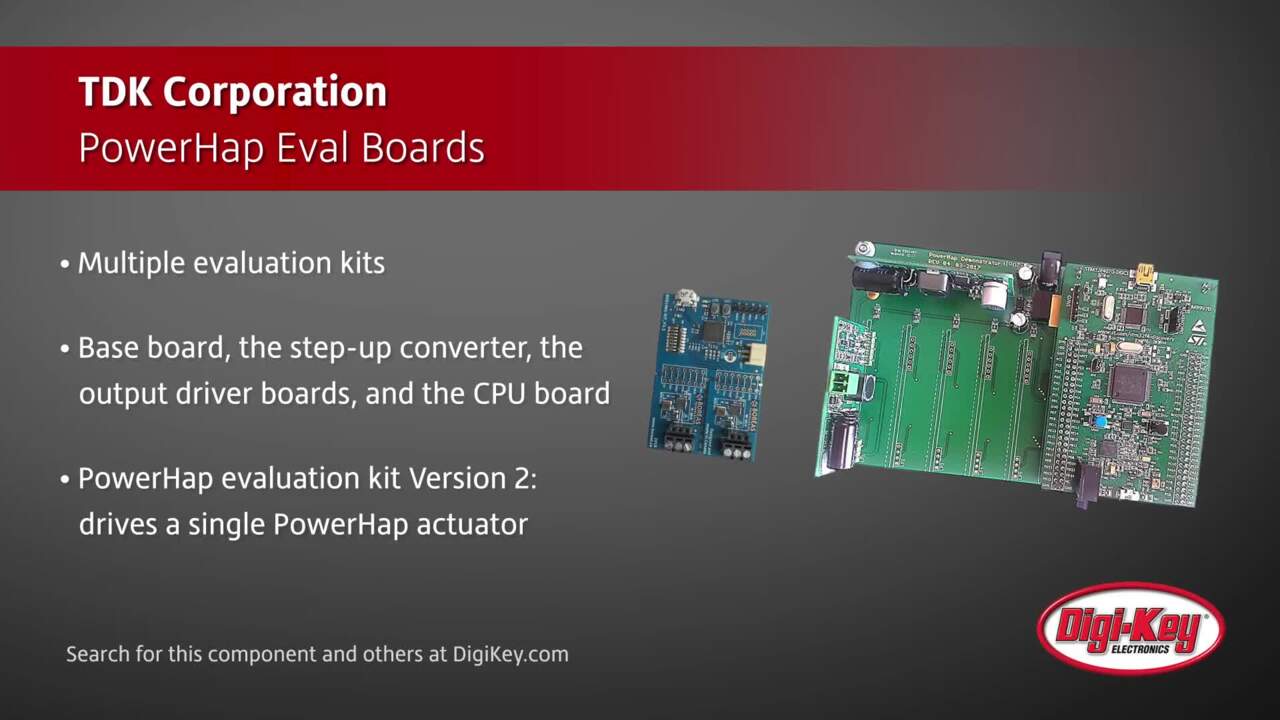
Til ingeniører, som ønsker at eksperimentere med egenskaberne for TDK's piezoelektriske haptiske aktuatorer, før de lægger sig fast på hardwaren, tilbyder firmaet et enkeltkanals Z63000Z2910Z 1Z 1 PowerHap-evalueringskit. Kittet indeholder et basekort, en step-up-konverter, et output-driverkort og et mikrocontrollerkort.
Kittet leveres med konfigurationssoftware, der kører på pc'er med Windows 7 (eller nyere). Når softwaren er blevet indlæst, sluttes kittet til pc'en via et USB-kabel, og der tilsluttes strøm på 12 volt (DC). Softwaren har et interface, hvor det er muligt at konfigurere den haptiske reaktion fra aktuatoren, når der trykkes på den. Interfacet giver mulighed for at konfigurere følgende signalparametre (figur 6):
- Amplitude – 5 til 100 procent (115 volt)
- Frekvens – 20 til 300 Hz
- Bølgeform (trapezformet, kvadratisk sinusbølge, savtak)
- Trapezformet driftscyklus – 35 til 75 procent
- Pulstal – 1 til 1000
- Triggerniveau – 0 til 12 volt (jo lavere triggerniveau, jo hårdere skal der trykkes på aktuatoren for at aktivere signalet)
- Forsinkelsestid (hvor der ikke registreres nogen trykkraft af aktuatoren)
 Figur 6: TDK PowerHap-evalueringskittets software viser et interface til signalkonfiguration. Når den er blevet indstillet, kan konfigurationen sendes til evalueringskortets processor via knappen "Transmit configuration" (Send konfiguration). (Billedkilde: TDK)
Figur 6: TDK PowerHap-evalueringskittets software viser et interface til signalkonfiguration. Når den er blevet indstillet, kan konfigurationen sendes til evalueringskortets processor via knappen "Transmit configuration" (Send konfiguration). (Billedkilde: TDK)
Softwaren giver også ingeniøren mulighed for at oprette tilpassede bølgeformer. Når softwaren er konfigureret, sendes oplysningerne til kittets processor via USB-kablet.
Et andet evalueringskit, PowerHap Z63000Z2910Z1Z44, er specifikt designet til ingeniører, der benytter sig af Boréas BOS1901CQT piezo-haptisk driver. Dette kit indeholder et basekort, en step-up-konverter, to drivere og en mikrocontroller. Basekittet leveres med én TDK piezoelektrisk haptisk aktuator (figur 7).
 Figur 7: TDK's Z63000Z2910Z1Z44 PowerHap-evalueringskit anvender Boréas piezo-haptiske drivere og overholder USB-audioprotokollen, så konfiguration bliver mere enkel. (Billedkilde: TDK)
Figur 7: TDK's Z63000Z2910Z1Z44 PowerHap-evalueringskit anvender Boréas piezo-haptiske drivere og overholder USB-audioprotokollen, så konfiguration bliver mere enkel. (Billedkilde: TDK)
Kortet tilsluttes en pc via USB-kabel, anvender standard USB-audioprotokollen og vises som en normal lydudgang for enhver computer. Bølgeform-prototyping (op til 190 voltspids-til-spids) og -afspilning kan udføres ved hjælp af USB-audioprotokollen for at lave prototyper af haptiske effekter i software som f.eks. MATLAB, Python og Audacity.
Konklusion
Haptisk feedback ved hjælp af piezoelektriske aktuatorer, ERM- og LRA-aktuatorer har forbedret styringen via touchskærm både inden for forbruger- og industrielle anvendelser. Dog har fremskridt inden for kompakte piezoelektriske haptiske aktuatorer med lavere spænding gjort fordelene ved haptisk feedback med høj opløsning i batteridrevne enheder større.
Samtidig er det blevet mindre vanskeligt at designe piezoelektriske haptiske systemer i kraft af fremkomsten af dedikerede drivere, som kommunikerer med populære applikationsprocessorer og understøtter en bred vifte af bølgeformer. Den umiddelbare tilgængelighed af evalueringskits til disse enheder fra leverandører som TDK giver mulighed for eksperimenteren og prototyping, før man lægger sig fast på et hardwaredesign.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.