Reducer bekymringer for EV'ens rækkevidde og forbedrér sikkerheden ved hjælp af integreret FOC-motorstyring og avancerede sensorer
Bidraget af DigiKeys nordamerikanske redaktører
2022-01-05
Designere af systemer til elektriske køretøjer (EV) og hybride elektriske køretøjer (HEV) (ofte kaldet xEV) er under konstant pres for at levere flere kilometer pr. opladning for at reducere bekymring for rækkevidde og mindske køretøjernes CO2-fodaftryk. Samtidig er de nødt til at tilføje flere motorer, sensorer, tilhørende elektronik, processorer og software for at opfylde højere niveauer af autonomi, brugerfunktioner og sikkerhed i køretøjer, samtidig med at omkostningerne skal nedbringes.
Motorer til døre, vinduer, batterikøleblæsere, radiatorblæsere og -pumper og andre funktioner er et særligt ømtåleligt problem, da de ikke blot øger vægten, men også kræver avancerede styringsalgoritmer som f.eks. feltorienteret styring (FOC) for at minimere støj og strømforbrug og samtidig sikre en jævn respons. Den samlede systemdesignopgave kompliceres af behovet for også at opfylde ISO 26262-kravene til funktionel sikkerhed og AEC-Q100 kvalitetsstandarderne.
For at imødegå disse udfordringer kan designere henvende sig til en række kvalificerede enheder til bilindustrien, som giver et højere niveau af hardware og software, der forenkler design og integration af forskellige funktioner, samtidig med at antallet af dele og det samlede fodaftryk reduceres.
Denne artikel omhandler de problemer, som designere af EV'er og HEV'er står over for. Derefter introduceres og vises det, hvordan man kan bruge en højt integreret FOC-børsteløs BLDC-motorcontroller (brushless direct current) og et tilhørende evalueringskort til at kickstarte et effektivt design af en EV/HEV-motor. Den indeholder også forskellige sensorer til overvågning af strøm, 3D-position, hastighed og retning, alt sammen fra en enkelt kilde, Allegro MicroSystems.
De spørgsmål om omkostninger, sikkerhed og rækkevidde, som EV'er står over for
Designerne af xEV'er skal tage stilling til mange spørgsmål, herunder køretøjets omkostninger, sikkerhed og pålidelighed - især i lyset af de stigende niveauer af autonomi, rækkevidde pr. opladning (range anxiety) og batteripakkens levetid.
For at understøtte sikkerhed og pålidelighed er der behov for avancerede sensorer, der opfylder kravene til avancerede førerassistentsystemer (ADAS-funktioner) som defineret i ISO 26262. Af hensyn til omkostninger og rækkevidde har designerne valgt strømskinner med højere spænding på op til 800 volt for at opnå større effektivitet og lavere kabelvægt, samtidig med at de har draget fordel af forbedringer i batteripakkedesignet.
For eksempel har bedre termisk styring af batterier bidraget til større rækkevidde og længere batterilevetid, mens bedre køling af EV- og HEV-traktionsinvertere bidrager til at øge effekt- og energitætheden og reducere vægten.
Mens højere niveauer af integration af halvlederenheder muliggør større funktionalitet med mindre vægt og plads, skal BLDC-motorerne til de nødvendige køleblæsere styres nøje for at optimere effektiviteten. For at opnå dette er det nyttigt at inkludere avancerede motorstyringsalgoritmer som FOC i motorstyringens gate-driver.
Højtydende køling
FOC muliggør jævn drift af elmotorer i hele deres hastighedsområde, og den kan generere fuldt drejningsmoment ved opstart. Desuden kan FOC levere hurtig og jævn motoracceleration og -afbremsning, hvilket er nyttigt til præcis styring i højtydende bevægelsesapplikationer. FOC kan bruges til at udvikle højeffektive, kompakte og støjsvage lavspændingsdrivere (50 volt DC og lavere) til en række højtydende BLDC-motorer på op til 500 watt. Disse anvendes typisk i xEV-højspændings batterikøleblæsere (HVV), samt i HVAC-blæsere (HVAC) og væskepumper til HV-traktionsinverter kølesystemer (Figur 1).
") Figur 1: FOC-motorcontrollere kan bruge LV-batteristrøm til at køle xEV HV-batterier og HV-traktionsinvertere. (Billedkilde: Allegro MicroSystems)
Figur 1: FOC-motorcontrollere kan bruge LV-batteristrøm til at køle xEV HV-batterier og HV-traktionsinvertere. (Billedkilde: Allegro MicroSystems)
I konventionelle konstruktioner implementeres FOC med eksterne sensorer ved hjælp af en mikrocontroller. Disse konstruktioner, der kaldes direkte FOC, kan være komplekse, og de har tendens til at lide under nedsat dynamisk respons på grund af deres afhængighed af eksterne sensorer til at måle motorens driftsparametre.
FOC med forbedret ydeevne og lavere omkostninger er muligt ved at fjerne de eksterne sensorer.
Oplysningerne fra de manglende sensorer er stadig nødvendige for at implementere FOC og kan udledes af spændingerne og strømmene ved motorens terminaler fra den elektromotoriske bagkraft (BEMF) i motorens viklinger. Mens hardwaren er enklere, kræver implementeringen af sensorløs FOC en mere kompleks styresoftware.
En sensorløs FOC-algoritme kan give den højeste effektivitet og dynamiske respons og samtidig minimere akustisk støj. Den giver også en robust open-loop opstart, når motoren står stille, og der ikke er nogen BEMF-oplysninger til rådighed.
Nem FOC til køleventilatorer og -pumper til biler
Mens de fleste FOC BLDC-drivere kræver, at softwareudviklere skal skrive og overføre algoritmer til en mikroprocessor eller mikrocontroller, integrerer A89307KETSR-J fra Allegro MicroSystems den sensorløse FOC-algoritme direkte i gate-driveren. Med kun fem eksterne passive komponenter (fire kondensatorer og en modstand) minimerer A89307KETSR-J også BOM (Bill Of Materials), forbedrer pålideligheden og reducerer kompleksiteten i designet (Figur 2).
") Figur 2: Et typisk kredsløb til en A89307KETSR-J xEV-batteripakke-køleblæser viser de fem eksterne komponenter: fire kondensatorer og en modstand. (Billedkilde: Allegro MicroSystems)
Figur 2: Et typisk kredsløb til en A89307KETSR-J xEV-batteripakke-køleblæser viser de fem eksterne komponenter: fire kondensatorer og en modstand. (Billedkilde: Allegro MicroSystems)
A89307KETSR-J gate driveren fungerer fra 5,5 til 50 volt DC. Den integrerede FOC-algoritme omfatter konstant drejningsmoment og konstant effekt samt driftstilstande med open-loop og konstant hastighed. A89307KETSR-J indeholder indgange til pulsbreddemodulation (PWM) eller clockmode-hastighedskontrol, bremsning og retning samt udgangssignaler for fejltilstande og motorhastighed (Figur 3).
") Figur 3: A89307KETSR-J's interne blokdiagram viser FOC-controlleren (i midten), PWM- eller clocktilstands-hastighedskontrol (SPD), bremse- (BRAKE) og retningsindgange (DIR) (til venstre) samt fejl- (FAULT) og motorhastigheds- (FG) udgange (også til venstre). (Billede: Allegro MicroSystems)
Figur 3: A89307KETSR-J's interne blokdiagram viser FOC-controlleren (i midten), PWM- eller clocktilstands-hastighedskontrol (SPD), bremse- (BRAKE) og retningsindgange (DIR) (til venstre) samt fejl- (FAULT) og motorhastigheds- (FG) udgange (også til venstre). (Billede: Allegro MicroSystems)
A89307KETSR-J er optimeret til at drive eksterne N-kanals effekt-MOSFET'er med lav modstand. Den kan levere de store spidsstrømme, der er nødvendige for hurtigt at tænde og slukke for MOSFET'erne for at minimere strømforbruget under omskiftning, forbedre driftseffektiviteten og reducere problemerne med termisk styring. Der er flere gate-driftsniveauer til rådighed, hvilket gør det muligt for designere at optimere kompromiset mellem elektromagnetisk interferens (EMI) emissioner og effektivitet. Hurtig tænding af MOSFET'erne reducerer koblingstabene, men øger EMI, mens langsommere tænding af MOSFET'erne reducerer EMI, men det medfører øget koblingstab og lavere effektivitet.
Motorens hastighed kan styres via PWM, analog eller CLOCK-indgang. Hastighedsstyring med lukket kredsløb er en mulighed med et programmerbart forhold mellem omdrejninger pr. minut (RPM) og frekvens i forhold til clock. Den sensorløse opstartskontrol omfatter registrering og synkronisering af fremadgående og bagudgående pre-rotation (vindmølle), hvilket gør det muligt for A89307KETSR-J at fungere over en lang række motor- og belastningskonfigurationer.
Allegro MicroSystems' algoritme Non-Reverse Startup forbedrer også opstartspræstationen. Motoren starter i den rigtige retning efter opstart uden omvendte vibrationer eller rystelser. Soft-On-Soft-Off funktionen øger gradvist strømmen til motoren med "on"-kommandoen (vindmølletilstand) og reducerer gradvist strømmen fra motoren med "off"-kommandoen, hvilket yderligere reducerer den akustiske støj (Figur 4).
 Figur 4: A89307KETSR-J strømkurveformerne for blødt "on" (øverst) og blødt "off" (nederst) resulterer i jævn motordrift og reduceret akustisk støj. (Billedkilde: Allegro MicroSystems)
Figur 4: A89307KETSR-J strømkurveformerne for blødt "on" (øverst) og blødt "off" (nederst) resulterer i jævn motordrift og reduceret akustisk støj. (Billedkilde: Allegro MicroSystems)
A89307KETSR-J indeholder en I2C-interface til indstilling af motorens nominelle strøm, spænding, hastighed, modstand og opstartsprofil. I2C implementerer også tænd/sluk- og hastighedskontrol samt hastighedsfeedback og fejlsignaler.
Sensorløs FOC eval-kort
Designere kan bruge APEK89307KET-01-T-DK eval boardet og den tilhørende software til at fremskynde udviklingen af FOC-baserede BLDC-motordrev ved hjælp af A89307KETSR-J (Figur 5). Dette kort indeholder A89307KETSR-J med adgang til alle ind- og udgangsben samt et komplet trefaset effekttrin til at drive en BLDC-motor. Designere kan vælge FOC-drevparametre ved hjælp af en simpel grafisk brugergrænseflade (GUI) og indlæse dem i EEPROM'en på chippen. A89307KETSR-J's minimale BOM-behov gør det muligt at designe drev, der passer ind i motorhuset, hvilket reducerer løsningsstørrelsen yderligere.
 Figur 5: APEK89307KET-01-T-DK evalkortet har A89307KETSR-J (U1, midt på venstre side af kortet) og seks effekt-MOSFET'er (højre side) til at drive en BLDC-motor. (Billedkilde: Allegro MicroSystems)
Figur 5: APEK89307KET-01-T-DK evalkortet har A89307KETSR-J (U1, midt på venstre side af kortet) og seks effekt-MOSFET'er (højre side) til at drive en BLDC-motor. (Billedkilde: Allegro MicroSystems)
Sensorer til ADAS
Designere af xEV-systemer skal registrere strømniveauer i motordrev, DC/DC-konvertere og invertere samt gashåndtagets og cylindernes roterende positioner og gearets hastighed og retning i transmissioner for at implementere kompakte og omkostningseffektive ADAS-funktioner. Allegro MicroSystems tilbyder en række forskellige sensorløsninger til ADAS, herunder:
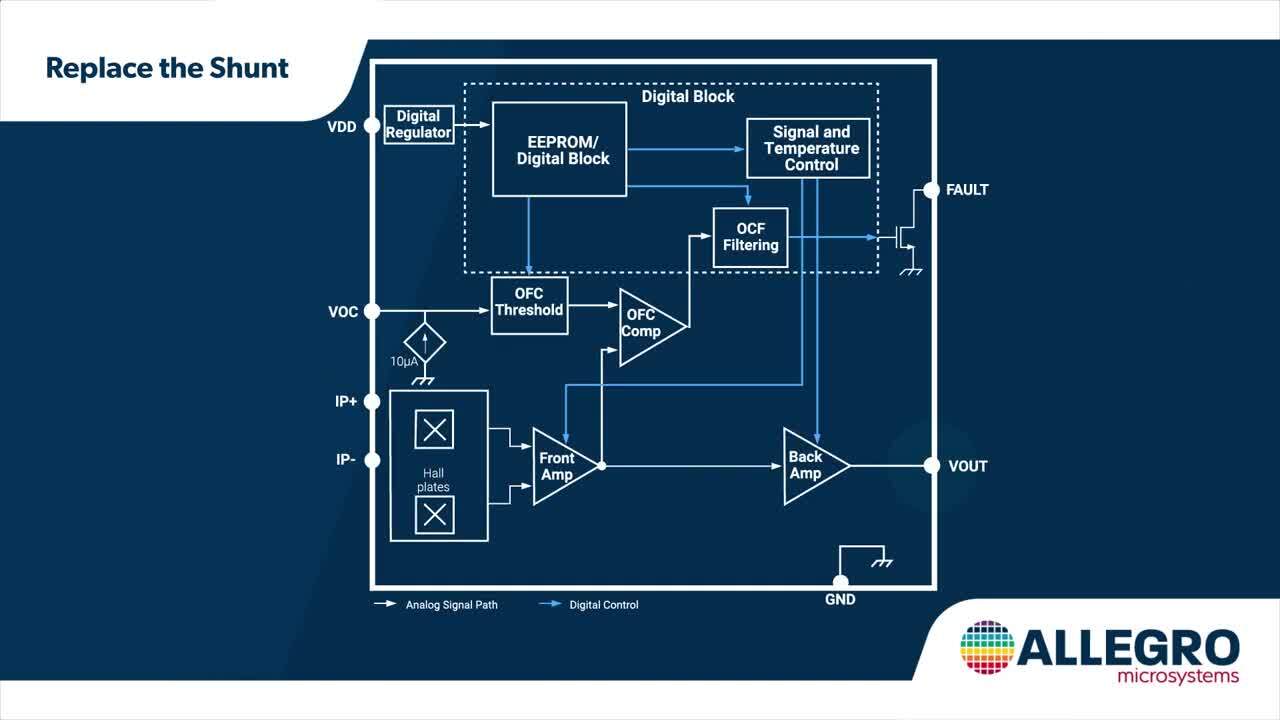
Strømsensing: ACS72981KLRATR-150B3 giver designere økonomisk og præcis AC- eller DC-strømsaflæsning. Denne lineære Hall-effekt strømsensor med høj præcision har en båndbredde på 250 kilohertz (kHz) og er designet til brug i motorstyring, DC/DC-konverterstyring, inverterstyring og belastningsregistrering og -styring. Det er en AEC-Q100-kvalificeret IC og har en responstid på <2 mikrosekunder (µs), hvilket understøtter de hurtige behov for overstrømsfejldetektion i sikkerhedskritiske applikationer.
3D-positionssensing: Kontaktløs lineær og roterende 3D-magnetisk positionsaflæsning til gas-, ventil-, cylinder- og transmissionspositionsaflæsning kan hurtigt implementeres ved hjælp af Allegro MicroSystems' A31315LOLATR-XY-S-SE-10 3DMAG IC. Enheden kan måle roterende bevægelser i det horisontale og vertikale plan og måle lineære bevægelser fra side til side eller fra front til ryg (Figur 6).
 Figur 6: A31315LOLATR-XY-S-SE-10 3D-positionssensoren kan måle roterende bevægelse i det horisontale og vertikale plan og måle lineær bevægelse fra side til side eller fra front til ryg. (Billedkilde: Allegro MicroSystems)
Figur 6: A31315LOLATR-XY-S-SE-10 3D-positionssensoren kan måle roterende bevægelse i det horisontale og vertikale plan og måle lineær bevægelse fra side til side eller fra front til ryg. (Billedkilde: Allegro MicroSystems)
A31315LOLATR-XY-S-S-SE-10-sensoren giver designere valget mellem ratiometriske analoge, PWM- eller SAE J2716 Single Edge Nibble Transmission (SENT)-outputformater. Den er udviklet til at opfylde ISO 26262 ASIL B (enkelt chip i en SOIC-8 pakning) og ASIL D (redundant dobbelt chip i en TSSOP-14 pakning) i sikkerhedsrelaterede bilsystemer.
Hastighed og retning: ATS19520LSNBTN-RSWHPYYU er en vibrationstolerant, differentiel Hall-effekt transmissionshastighed og retningsføler for tandhjul med modeller til registrering af fremadgående og bagudgående retning (Figur 7).
 Figur 7: Den viste "F"-variant af ATS19520 måler fremadgående rotation, når en tandhjulstand passerer fra ben 1 til ben 3 (øverst), og bagudgående rotation, når en tandhjulstand passerer fra ben 3 til ben 1 (nederst). "R"-varianten måler rotationen i modsat retning. (Billedkilde: Allegro MicroSystems)
Figur 7: Den viste "F"-variant af ATS19520 måler fremadgående rotation, når en tandhjulstand passerer fra ben 1 til ben 3 (øverst), og bagudgående rotation, når en tandhjulstand passerer fra ben 3 til ben 1 (nederst). "R"-varianten måler rotationen i modsat retning. (Billedkilde: Allegro MicroSystems)
Den ISO 26262 ASIL B-klassificerede sensor har integreret diagnosticering og er velegnet til brug i xEV-drivlinjer. Den tre-bens, single-in-line pakke (SIP) indeholder en integreret back bias-magnet til måling af hastigheden og retningen af roterende jernholdige mål og en integreret kondensator for at sikre elektromagnetisk kompatibilitet.
Konklusion
Integrerede sensorløse FOC BLDC-motordrev uden sensorer er sammen med strømsensorer, magnetiske positionssensorer og rotationssensorer nøglekomponenter, der gør det muligt at designe effektive og sikre xEV'er med større rækkevidde og lavere CO2-fodaftryk. Især brugen af FOC-motordrev gør det muligt at designe mere effektive og støjsvage kølesystemer med forbedret dynamisk respons for batteripakker og traktionsinvertere. Kompakte, præcise og energieffektive sensorer er afgørende for udviklingen af xEV'er, der opfylder krav til pålidelighed til avancerede førerassistent-systemer og de funktionelle sikkerhedskrav i ISO 26262.
Anbefalet læsning
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.