Hvordan SMV'er kan bruge et industrielt metaverse til at udforske og implementere robotløsninger hurtigt
Bidraget af DigiKeys nordamerikanske redaktører
2024-11-21
Robotter og samarbejdende robotter (cobots) er på forkant med teknologien inden for fabriksautomatisering. Digitale tvillinger og virtual reality (VR) er på forkant med design- og udviklingsværktøjer. Tilsammen kan de udnyttes til at skabe et industrielt metaverse, der giver højere produktivitet hurtigere, selv for små og mellemstore virksomheder (SMV'er).
Designere i SMV'er kan drage fordel af en enkel og intuitiv grænseflade, der kombinerer en digital tvilling, en meget detaljeret virtuel model af et fysisk objekt som en delta-, lineær- eller multiakse-robot og et 3-dimensionelt (3D) VR-miljø for at muliggøre direkte udførelse og kontrol af robottens bevægelsessekvenser.
Brug af disse funktioner understøtter finjustering og optimering af automatiseringssystemet, selv uden fysisk hardware, og muliggør hurtig udforskning af flere løsningsmuligheder.
Denne artikel gennemgår først forskellen mellem en matematisk, databeskrevet digital tvilling og en visuel digital tvilling (VR-tvilling), og hvordan begge dele er nødvendige for at skabe det industrielle metaverse. Derefter præsenteres et robotstyringssystem og tilhørende software fra Igus, der kan bruges til at simulere en robot på en 3D-grænseflade (visuel digital tvilling) uden brug af fysisk hardware, sammen med kompatible delta-, lineære og fleraksede robotter, der kan bruges til at realisere den optimerede løsning.
Digitale tvillinger og VR er komplementære teknologier, der bruger forskellige visualiseringsformer, interaktioner og hardware. Digitale tvillinger er databaserede modeller af fysiske objekter, systemer eller processer. De er designet til at blive brugt i hele livscyklussen for den genstand, der modelleres, fra den første udformning til nedlukning og genbrug.
VR er en fordybende, visuelt baseret teknologi, som også bruger digitale modeller. I et VR-miljø er det muligt at simulere relationer og interaktioner mellem objekter, som f.eks. en robot, der udfører en opgave. Så selvom begge teknologier kan bruges til design og simulering, er digital tvillingeteknologi fokuseret på overordnede livscyklusovervejelser, og VR fokuserer på interaktioner mellem fysiske objekter.
Et metaverse kombinerer digitale tvillinger og VR i et specialbygget virtuelt miljø, der understøtter realtidsinteraktioner mellem de digitale objekter og mennesker. Det forbindes ofte med spil, men anvendes i stigende grad til forretnings- og industriaktiviteter.
Velkommen til iguverse
Igus har udviklet iguverse metaverse til at understøtte ingeniørinteraktioner i industrielle miljøer, som f.eks. udvikling og implementering af robotsystemer. Iguverse kan implementeres via Igus Robot Control (iRC)-software. Denne gratis og licensfrie applikation giver brugerne mulighed for at styre forskellige typer robotter, herunder delta-robotter, cobots (robotarme) og gantry-robotter.
Det giver brugerne en 3D-grænseflade og over 100 eksempler på programmer. Systemkravene for at implementere iRC omfatter en pc (minimum en Intel i5 CPU) med Windows 10 eller 11 (64-bit) med 500 MB ledig diskplads og Ethernet eller trådløs netværksforbindelse.
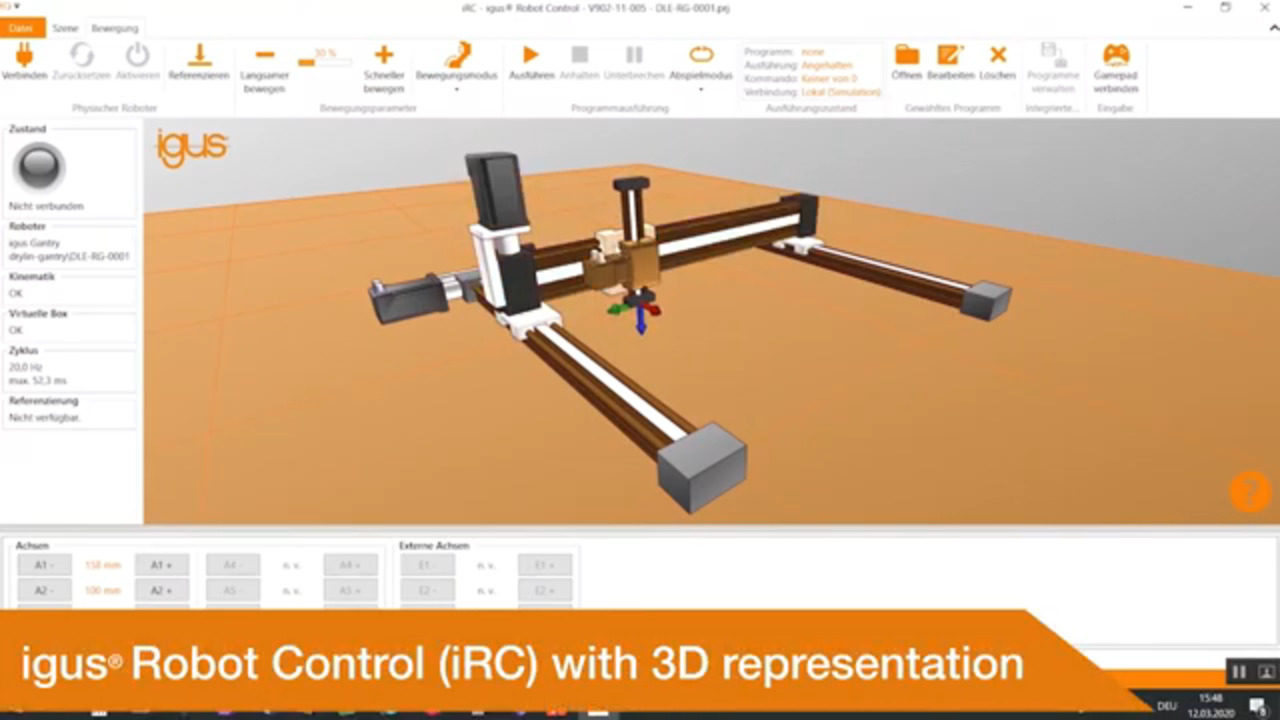
Softwarens kerne er en digital 3D-tvilling af den robot, der programmeres. Et eksempel på dette er en treakset lineær gantry-robot som model DLE-RG-0001-AC-500-500-100 med et arbejdsområde på 500 x 500 x 100 mm eller en toakset xy-aktuator som model DLE-LG-0012-AC-800-500 med et arbejdsområde på 800 x 500 mm (figur 1). Designere kan definere bevægelser med et par museklik og bruge 3D-modellen til at sikre, at de ønskede bevægelser kan lade sig gøre, selv før de køber robotten.
 Figur 1: Eksempel på en 3D VR digital tvilling af en treakset gantry-robot i iguverse. (Billedkilde: Igus)
Figur 1: Eksempel på en 3D VR digital tvilling af en treakset gantry-robot i iguverse. (Billedkilde: Igus)
Ud over iRC-softwaren er robotstyringen et nøgleelement i iguverse-udviklingsmiljøet. Modellen IRC-LG12-02000 er f.eks. til 48 V-motorer, har syv indgange og syv udgange og har et 10 m langt kabel til tilslutning til robotten. IRC-controllerne omfatter motordrivermoduler til forskellige størrelser af bipolare stepmotorer og fås konfigurerbare eller forkonfigurerede. Den har også flere grænseflader til systemintegration, bl.a:
- Programmerbar logisk controller (PLC)-interface til styring via de digitale ind- og udgange, især til nem start og stop af programmer via en PLC eller trykknap
- Modbus TCP-interface til styring via en PLC eller pc
- Common Robotic Interface (CRI) Ethernet til styring og konfiguration ved hjælp af en PLC eller pc
- Robot Operating System (ROS)-grænseflade til betjening af robotten ved hjælp af ROS
- Interface til kameraer med objektdetektering
- Cloud-interface til fjernovervågning af robottens tilstand
Understøttet kinematik
En række kinematikker (grundlæggende bevægelser), der definerer robottens kontrollerede bevægelse, understøttes i iguverse. Ud over den forudkonfigurerede kinematik kan op til tre yderligere kinematisk uafhængige akser konfigureres i IRC. Den forudkonfigurerede kinematik omfatter:
- 2-aksede og 3-aksede delta-robotter
- Gantry-robotter,
- 2-akse (X- og Y-akse)
- 2-akse (Y- og Z-akse)
- 3-akse (X- , Y- og Z-akse)
- Robotarme (cobots),
- 3-akse (akse 1, 2, 3)
- 3-akse (akse 2, 3, 4)
- 4-akse (akse 1, 2, 3, 4)
- 4-akse (akse 2, 3, 4, 5)
- 5-akse (akse 1 til 5)
- 6-akse (akse 1 til 6)
- 4-akse SCARA-robot
Nem programmering til billig automatisering
Igus-robotter og IRC er designet til at understøtte billig automatisering. Det ville ikke være muligt uden en brugervenlig programmeringsgrænseflade. En 3-knaps mus eller en gamepad kan flytte og placere en robot i iguverse. Med IRC-softwaren kan en bruger frit bevæge alle akser på den digitale tvilling i 3D-grænsefladen. En teach-in-funktion understøtter udviklingen af software til robotstyring, selv uden at en fysisk robot er tilsluttet.
For at implementere teach-in flytter brugeren manuelt den virtuelle robot til den ønskede position og definerer, hvordan den bevæger sig derhen. Processen gentages, indtil den komplette bevægelsesprofil er oprettet. Værktøjscenteret i IRC-softwaren giver brugerne mulighed for nemt at tilføje matchende endeeffekter, som f.eks. gribere, og justerer automatisk værktøjscenterpunktet på robotten. Derudover kan der tilføjes en forbindelse til et industrielt kontrolsystem på højere niveau.
Processen begynder med at aktivere robotten ved hjælp af knapperne "connect", "reset" og "enable" efter behov i grænsefladen. Status-LED'en på IRC'en skal blive grøn, og status skal vise "Ingen fejl". Bevægelsesprofilen kan nu indtastes ved hjælp af fanen "Jogging" (figur 2).
 in the iguverse immersive development environment (click to enlarge)") Figur 2: Fanen "Jogging" (nederst til venstre) i det fordybende udviklingsmiljø iguverse kan bruges til at indtaste bevægelsesprofiler. (Billedkilde: Igus)
Figur 2: Fanen "Jogging" (nederst til venstre) i det fordybende udviklingsmiljø iguverse kan bruges til at indtaste bevægelsesprofiler. (Billedkilde: Igus)
Gantry-robotter
Gantry-robotter, som dem, der indgår i de foregående eksempler på iguverse, består af to grundlæggende X-akser, en Y-akse og en valgfri Z-akse. Y-aksen er fastgjort til de to parallelle X-akser og bevæger sig frem og tilbage i det todimensionale rum. Den valgfrie Z-akse understøtter en tredje bevægelsesdimension.
Gantry-robotter fra Igus har selvsmørende plastforinger, som glider og ruller mere jævnt og støjsvagt end traditionelle kuglelejebaserede designs. Det nye design er lettere, korrosionsbestandigt og vedligeholdelsesfrit, hvilket er vigtige egenskaber for små og mellemstore virksomheder. Det er også afgørende for SMV'er, at disse robotter koster op til 40 % mindre end traditionelle gantry-robotter, hvilket giver et hurtigere investeringsafkast (ROI).
Disse robotter er velegnede til to typer opgaver: lave hastigheder med høje belastninger eller høje hastigheder med lave belastninger. Repræsentative anvendelser omfatter emballering, pick-and-place, mærkning, materialehåndtering og montage.
De tilbydes i en række forskellige størrelser. Tilgængeligt tilbehør omfatter koblinger, endeeffektorer og motorflanger. Eksempler på mellemstore gantry-robotter er bl.a:
- DLE-FG-0006-AC-650-650 er en todimensionel flad gantry med et arbejdsområde på 650 x 650 mm. Denne robot kan håndtere nyttelast på op til 8 kg og har en dynamisk hastighed på op til 20 pluk pr. minut.
- DLE-RG-0012-AC-800-800-500 er en tredimensionel gantry med et arbejdsområde på 800 x 800 x 500 mm. Den kan håndtere nyttelast på op til 10 kg med en dynamisk hastighed på op til 20 pluk pr. minut.
Evne til at palletere
Palletering af produkter til forsendelse er en dagligdags aktivitet inden for produktion og logistik. Det nyeste og største medlem af iguverse er den store XXL-gantry-robot med et arbejdsområde på 2.000 x 2.000 x 1.500 mm, som er velegnet til palleteringsopgaver på op til 10 kg. Specialdesigns med arbejdsområder på op til 6.000 x 6.000 x 1.500 mm er tilgængelige.
Disse gantry-robotter kan plukke dele, der vejer op til 10 kg, transportere dem med en hastighed på op til 500 mm/s og placere dem på en palle med en gentagelsesnøjagtighed på 0,8 mm (figur 3). Igus' palleteringsrobotløsning koster op til 60 % mindre end sammenlignelige systemer.
 Figur 3: Palletering er en almindelig og vigtig aktivitet inden for produktion og logistik og kan automatiseres ved hjælp af en gantry-robot. (Billedkilde: Igus)
Figur 3: Palletering er en almindelig og vigtig aktivitet inden for produktion og logistik og kan automatiseres ved hjælp af en gantry-robot. (Billedkilde: Igus)
Delta-robotter
Ligesom gantry-robotter fås delta-robotter med to eller tre akser. Delta-robotter har et kuppelformet arbejdsområde monteret over arbejdsområdet. De har usædvanligt høje hastigheder og bruges ofte til materialehåndtering og placering af dele. Eksempler på Igus' delta-robotter er bl.a:
- RBTX-IGUS-0047 er et treakset design med en arbejdsområdediameter på 660 mm. Den har en nøjagtighed på ±0,5 mm, en maksimal nyttelast på 5 kg, en maksimal hastighed på 0,7 m/s og kan udføre op til 30 pluk pr. minut. (Figur 4).
- RBTX-IGUS-0059 er et 2-akset design med en arbejdsområdediameter på 700 mm. Den har også en nøjagtighed på ±0,5 mm. Den maksimale nyttelast er 5 kg, den maksimale hastighed er 2 m/s, og den kan udføre op til 50 pluk pr. minut.
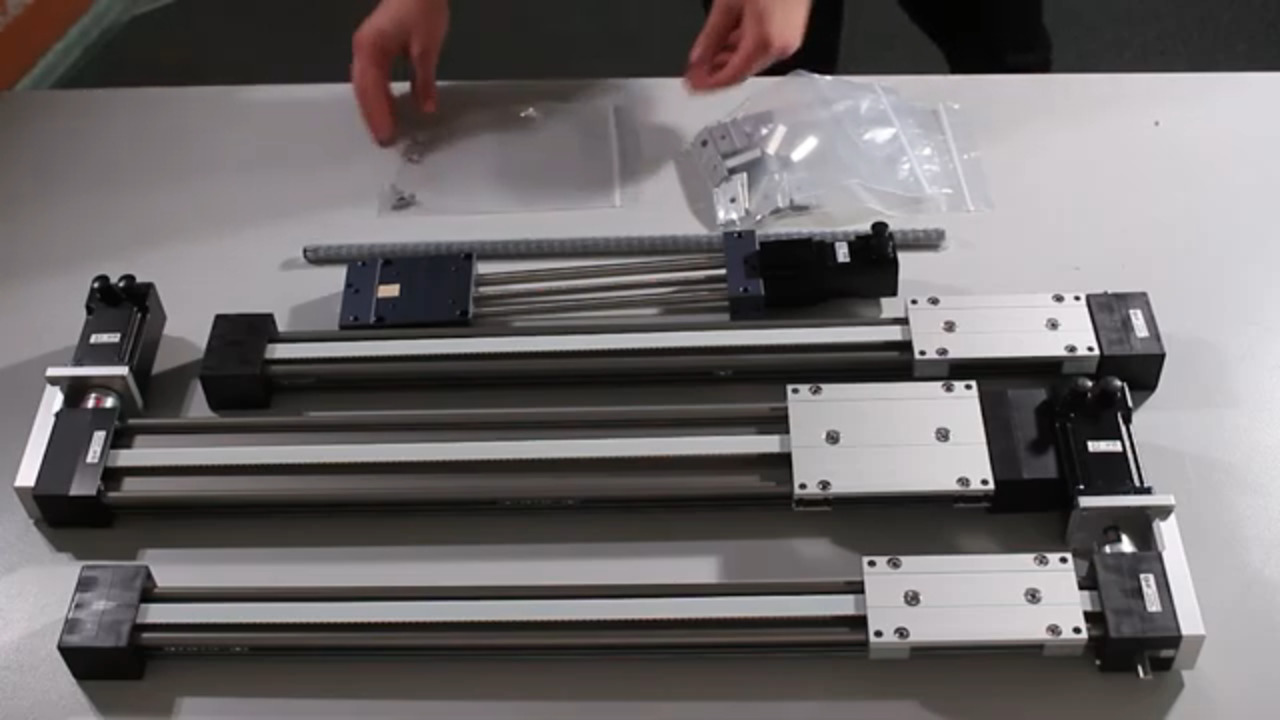
 Figur 4: Eksempel på en treakset delta-robot ved siden af en Igus iRC (til venstre). (Billedkilde: DigiKey)
Figur 4: Eksempel på en treakset delta-robot ved siden af en Igus iRC (til venstre). (Billedkilde: DigiKey)
Robotter med leddelte arme
Iguverse understøtter også cobots med leddelte arme. Cobots kan have fra to til 10 eller flere akser, også kaldet frihedsgrader (DOF). De har generelt store arbejdsområder og kan udføre komplekse opgaver i samarbejde med en person. Igus model REBEL-6DOF-02 har 6 DOF og model REBEL-4DOF-02 har 4 DOF. Begge har en nøjagtighed på ±1 mm, et nominelt arbejdsområde på 400 mm og kan udføre mindst 7 pluk pr. minut med en lineær hastighed på 200 mm/s.
6 DOF-modellen har en maksimal nyttelast på 2 kg og en maksimal rækkevidde på 664 mm. 4 DOF-modellen har en maksimal nyttelast på 3 kg og en maksimal rækkevidde på 495 mm (figur 5).
 and 6 DOF (right)") Figur 5: Leddelte arm-cobots med 4 DOF (venstre) og 6 DOF (højre). (Billedkilde: Igus)
Figur 5: Leddelte arm-cobots med 4 DOF (venstre) og 6 DOF (højre). (Billedkilde: Igus)
Oversigt
Det fordybende industrielle metaverse iguverse kombinerer digitale tvillinger og VR for at give værktøjer, der muliggør hurtig udvikling og implementering af robotløsninger. Den er gratis, licensfrit og designet til at køre lokalt på en pc uden en cloud-forbindelse. Den kan bruges til at udvikle og teste robotløsninger, uden at der er en robot til stede.
Den understøtter en bred vifte af kinematik i delta-robotter, gantry-robotter, robotarme (cobots) og SCARA-robotter. IRC omfatter en række grænseflader til understøttelse af automatiserings- og driftsbehov, herunder PLC-grænseflade, Modbus TCP/IP, CRI Ethernet, ROS-grænseflade, en grænseflade til objektdetekteringskameraer og en Cloud-grænseflade. iguverse, iRC og relaterede robotter fra Igus er optimeret til at understøtte SMV'ers behov for billig automatisering.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.