Hurtig implementering af GNSS-moduler til positionering med flere konstellationer
Bidraget af DigiKeys nordamerikanske redaktører
2021-09-09
Anvendelsen af positionsbaserede funktioner ved hjælp af GNSS-modtagere (Global Navigation Satellite System) med flere konstellationer til Europas Galileo, USA's Global Positioning System (GPS), Ruslands GLONASS, Kinas BeiDou-navigationssatellitsystem og Japans QZSS er stigende på tværs af en række applikationer, herunder robotteknologi, autonome køretøjer, industriel automatisering, logistik og tracking af aktiver, droner samt landbrugs- og tungt entreprenørmateriel. Fordelene ved at anvende GNSS-modtagere med flere konstellationer er bl.a. bedre tilgængelighed af positions-, navigations- og tidssignalerne (PNT-signaler), øget nøjagtighed og integritet samt forbedret robusthed af applikationer.
Men udviklingen af multi-konstellationsmodtagere er en kompleks og tidskrævende aktivitet, der omfatter: Optimering af L-band antenne, design af RF-frontend, integration af algoritmer til basband-signalbehandling til at opsamle, tracke og korrigere de forskellige PNT-signaler, kodning af applikationens behandlingssoftware til at udtrække PNT-data fra hver enkelt kanal i baseband'et og bruge oplysningerne til at implementere systemfunktioner. Designerne skal også vælge en passende antenne og placere den korrekt.
Som et alternativ kan designere henvende sig til færdigbyggede GNSS-moduler og udviklingsmiljøer for hurtigt og effektivt at integrere positioneringskapacitet i et system. Disse GNSS-moduler omfatter RF-front-end, baseband-behandling og indlejret firmware for at fremskynde udviklingen af software til applikationsbehandling. Nogle GNSS-moduler omfatter også antennerne.
I denne artikel gennemgås det grundlæggende om GNSS, PNT og driften af GNSS-modtagere med flere konstellationer. Derefter gennemgås fordele og ulemper ved at integrere antenner i GNSS-moduler, inden der præsenteres yderligere GNSS-moduler, med og uden integrerede antenner, samt tilhørende evalueringskort fra STMicroelectronics, Septentrio og Würth Elektronik, som designere kan anvende til effektiv og omkostningseffektiv udvikling af præcise og robuste positionsbaserede applikationer.
Hvad er GNSS og PNT?
GNSS og PNT er nært beslægtede begreber. GNSS-satellitter er den mest almindelige kilde til PNT-signaler. GNSS-satellitter er i princippet meget nøjagtige synkroniserede ure, der konstant sender deres PNT-informationer. Et GNSS-modul modtager PNT-signaler fra en given satellit og beregner sin afstand til denne satellit. Når modtageren kender afstanden til mindst fire satellitter, kan den vurdere sin egen position. Nøjagtigheden af positionsestimationen påvirkes imidlertid af en række fejlkilder, herunder:
- Ur-drift i GNSS-satellitternes tidstagningskredsløb
- Uklarheder i forudsigelsen af GNSS-satellitternes nøjagtige position i kredsløb
- Generelle afvigelser i det samlede satellitudstyrsydeevne i forhold til andre satellitter, også kendt som satellitbias
- Forvrængninger og forsinkelser i signaloverførslen, når det passerer gennem ionosfæren og troposfæren.
- Multipath-refleksion og variabel ydeevne og drift i modtageren
Der er forskellige teknikker til rådighed for designere til at korrigere for satellitbaserede og atmosfæriske GNSS-fejl.
Forbedring af GNSS-ydelsen
Den bedste måde at minimere virkningen af fejl, der stammer fra GNSS-modtageren, er at bruge den modtager med den højeste ydeevne, der passer til de omkostnings- og størrelsesmæssige begrænsninger for en given applikation. Men selv højtydende modtagere er ikke perfekte; deres ydeevne kan sandsynligvis forbedres. Det er vigtigt at forstå disse korrektionsmetoder, da de har forskellige ydeevne, og nogle GNSS-moduler kan ikke implementere dem alle.
Jordbaserede referencestationer anvendes af flere GNSS-korrektionsmetoder (figur 1). De mest etablerede metoder til brug af jordbaserede referencestationer til at levere GNSS-korrektioner til modtagerne er realtidskinematisk (RTK) og præcis punktpositionering (PPP). På det seneste er der kommet hybride RTK-PPP-metoder til rådighed.
 Figur 1: En GNSS-modtager kan få oplysninger om atmosfære-, ur- og banefejl fra et referencenetværk for at forbedre nøjagtighed af position. (Billedkilde: Septentrio)
Figur 1: En GNSS-modtager kan få oplysninger om atmosfære-, ur- og banefejl fra et referencenetværk for at forbedre nøjagtighed af position. (Billedkilde: Septentrio)
RTK er afhængig af en enkelt basisstation eller et lokalt referencenetværk til korrektionsdata, som kan fjerne de fleste GNSS-fejl. RTK forudsætter, at basisstationen og modtageren er tæt placeret - højst 40 km fra hinanden - så de oplever de samme fejl. Post-Processed Kinematic eller PPK er en variant af RTK som anvendes i vid udstrækning inden for opmåling og kortlægning for at opnå positionsdata med høj præcision eller centimeterpræcision.
Kun fejl i kredsløb og satellitur bruges til at foretage PPP-korrektioner. Disse satellitspecifikke fejl er uafhængige af modtagerens placering, hvilket begrænser antallet af nødvendige referencestationer. PPP tager imidlertid ikke højde for atmosfære-relaterede fejl og har derfor en lavere nøjagtighed end RTK. Desuden kan PPP-korrektioner have en initialiseringstid på ca. 20 minutter. Den længere initialiseringstid og den lavere nøjagtighed gør PPP upraktisk for mange applikationer.
Applikationer, der har brug for nær RTK-nøjagtighed og hurtig initialisering, anvender ofte den nyeste GNSS-korrektionstjeneste, RTK-PPP (undertiden kaldet state-space representation (SSR)). Det anvender et referencenetværk med stationer med ca. 100 km mellemrum, der indsamler GNSS-data og beregner en kombination af satellit- og atmosfæriske korrektioner. Referencenettet bruger internettet, satellit- eller mobiltelefonnet til at sende korrektionsdataene til abonnenterne. GNSS-modtagere, der anvender RTK-PPP, kan have en nøjagtighed på under en decimeter. Valget af RTK-, PPP- og RTK-PPP-korrektionsmetoder indebærer en række designmæssige afvejninger, som udviklerne skal gennemgå for at vælge den optimale løsning til den specifikke applikationsprofil. (Figur 2).
 Figur 2: Styrker og svagheder ved tre almindelige GNSS-korrektionsmetoder. (Billedkilde: Septentrio)
Figur 2: Styrker og svagheder ved tre almindelige GNSS-korrektionsmetoder. (Billedkilde: Septentrio)
Satellitbaserede augmentationssystemer (SBAS) er begyndt at blive tilgængelige på regionalt plan som erstatning for RTK-, PPP- og RTK-PPP-jordstationsbaserede korrektionsmetoder. SBAS anvender stadig jordstationer til at måle GNSS-fejl, men stationerne er spredt over hele kontinenter. De målte fejl behandles på et centralt sted, hvor korrektionerne beregnes og transmitteres til geosynkrone satellitter over det dækkede område. Korrektionsdataene udsendes fra satellitterne som et overlay eller en tilføjelse til de oprindelige GNSS-data.
GNSS-nøjagtigheden afhænger af tilgængeligheden og nøjagtigheden af satellitmålinger og de tilhørende korrektioner. GNSS-modtagere med høj ydeevne tracke GNSS-signaler ved flere frekvenser og anvender flere GNSS-konstellationer og forskellige korrektionsmetoder for at opnå den nødvendige nøjagtighed og modstandsdygtighed. Den deraf følgende redundans muliggør en stabil ydeevne, selv hvis nogle af satellitmålingerne og -dataene oplever interferens. Designere kan vælge mellem en række forskellige GNSS-nøjagtigheder og redundansfunktioner (figur 3).
 Figur 3: GNSS-nøjagtighedsklasser med tilhørende korrektionsmetoder og udvalgte anvendelser. (Billedkilde: Septentrio)
Figur 3: GNSS-nøjagtighedsklasser med tilhørende korrektionsmetoder og udvalgte anvendelser. (Billedkilde: Septentrio)
GNSS-moduler: Integrerede vs. eksterne antenner
På grund af kompleksiteten af positionering i flere konstellationer findes der moduler fra forskellige leverandører, som hjælper med at fremskynde markedsføring, sænke omkostninger og sikre ydeevne. Designere skal derfor overveje, om de vil bruge en intern antenne eller i stedet vælge en antenne, der er placeret uden for GNSS-modulet. Til anvendelser, hvor markedsføringstid og omkostninger er en prioritet, kan en integreret antenne være at foretrække, da der er betydeligt mindre ingeniørarbejde involveret. For applikationer, der kræver FCC- eller CE-certificering, kan brugen af et modul med en integreret antenne også fremskynde godkendelsesprocessen. Løsningen kan dog blive større, og fleksibiliteten kan være begrænset med integrerede antenneløsninger.
Eksterne antenner giver designerne et større udvalg af ydeevne og layout muligheder. Der kan vælges en stor antenne med høj ydeevne eller en mindre og mindre antenne med lavere ydeevne. Desuden er antenneplaceringen mere fleksibel i forhold til placeringen af GNSS-modulet, hvilket øger fleksibiliteten i designet yderligere. Placeringsfleksibiliteten gør det også muligt at anvende eksterne antenner til at sikre en mere pålidelig GNSS-drift. Antenneplacering og forbindelsesvejledning kan imidlertid være en kompleks og tidskrævende proces og kræver specifik ekspertise, hvilket potentielt kan øge omkostningerne og forsinke time-to-market.
Lille GNSS-modul til design med begrænset plads
Designteams med den nødvendige ekspertise inden for antenneplacering og routing kan bruge STMicroelectronics' Teseo-LIV3F er et GNSS-modul med flere konstellationer (GPS/Galileo/GLONASS/BeiDou/QZSS), der bruger en ekstern antenne (figur 4). Modulet leveres i en LCC-18-pakke på 9,7 mm x 10,1 mm og har en CEP-positionsnøjagtighed på 1,5 meter (m) med en tid til første fix (TTFF) for kold- og varm start på under 32 sekunder (s) og under 1,5 s (GPS, GLONASS). Den har et strømforbrug i standby på 17 mikrowatt (µW) og et strømforbrug ved tracking på 75 milliwatt (mW).
 Figur 4: Tesco-LIV3F GNSS-modulet omfatter GNSS-kernen og -undersystemerne samt alle nødvendige tilslutningsmuligheder og strømstyring i en pakke på 9,7 x 10,1 mm. Den kræver en ekstern antenne. (Billedkilde, STMicroelectronics)
Figur 4: Tesco-LIV3F GNSS-modulet omfatter GNSS-kernen og -undersystemerne samt alle nødvendige tilslutningsmuligheder og strømstyring i en pakke på 9,7 x 10,1 mm. Den kræver en ekstern antenne. (Billedkilde, STMicroelectronics)
Tesco-LIV3F's indbyggede 26 megahertz (MHz) temperaturkompenserede krystaloscillator (TCXO) er med til at sikre høj nøjagtighed, og den dedikerede 32 kilohertz (kHz) realtids-clock oscillator (RTC) muliggør en reduceret tid til første fix (TTFF). Funktioner som datalogning, syv dages autonomt assisteret GNSS, genkonfigurerbarhed af firmware (FW) samt FW-opgraderinger muliggøres af den indbyggede 16 megabit (Mbit) flash-hukommelse.
Tesco-LIV3F kan anvendes til forsikring, logistik, droner, vejafgifter, tyverisikringssystemer, lokalisering af personer og kæledyr, tracking af køretøj og nødopkald.
Som en præcertificeret løsning kan brugen af Teseo-LIV3F-modulet resultere i en kortere time-to-market af den endelige applikation. Den har et driftstemperaturområde på -40 °C til +85 °C.
For at eksperimentere med modulet og fremskynde applikationsudviklingen kan designere bruge AEK-COM-GNSST31-evalueringskortet. Når den anvendes sammen med X-CUBE-GNSS1-firmwaren, kan evalueringspakken understøtte opsamling, tracke, navigation og dataoutputfunktionalitet uden ekstern hukommelse. Denne EVB er også designet til brug med en SPC5-mikrocontroller til udvikling af applikationer til bilindustrien.
GNSS-modul med interferensdæmpning
Septentrio's 410322 mosaic-X5 multi-konstellation GNSS-modtager med flere konstellationer er et overflademonteret modul med lavt strømforbrug, der måler 31 mm x 31 mm x 4 mm, og som giver designere et udvalg af grænseflader, herunder fire UART'er, Ethernet, USB, SDIO og to programmerbare GPIO'er.
Mosaic-X5 er designet til brug i robotteknologi, autonome systemer og andre massemarkedsapplikationer og har en opdateringshastighed på 100 Hertz (Hz), en latenstid på under 10 millisekunder (ms) og en vertikal og horisontal RTK-positioneringsnøjagtighed på henholdsvis 0,6 cm og 1 cm. Den kan tracke alle GNSS-konstellationer og understøtter nuværende og fremtidige signaler og er kompatibel med PPP-, SSR-, RTK- og SBAS-korrektioner. Modulets TTFF er under 45 s ved koldstart og under 20 s ved varmstart.
Mosaic-X5 er udstyret med flere patenterede Septentrio teknologier, herunder AIM+, en indbygget teknologi til afbødning af interferens, der undertrykker en række forskellige interferensformer, fra simple kontinuerlige smalbånd-signaler til komplekse bredbånds- og pulserende støjsendere.
Modulernes grænseflader, kommandoer og datameddelelser er fuldt dokumenteret. Den medfølgende RxTools-software giver mulighed for konfiguration og overvågning af modtageren samt datalogning og analyse.
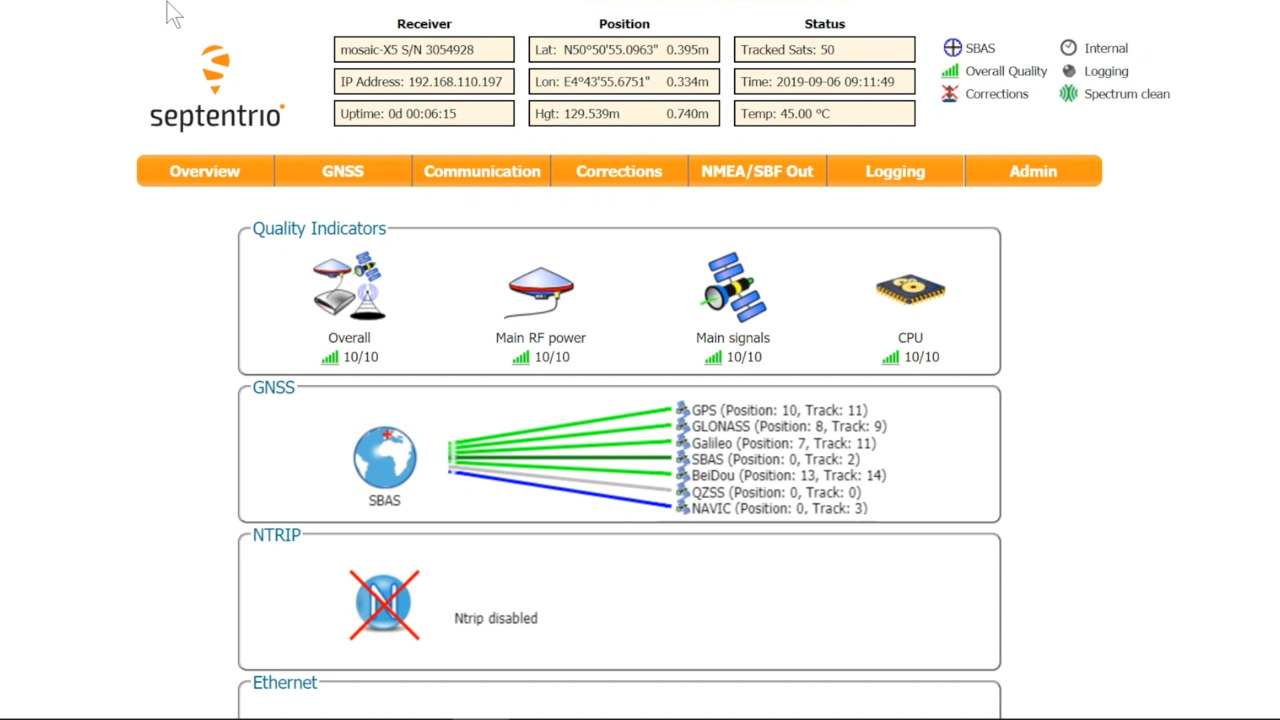
Septentrios 410331P3161 mosaic-X5 udviklingssæt giver designere mulighed for at udforske, evaluere og udvikle prototyper, der udnytter mosaic-X5's muligheder fuldt ud (Figur 5).
 Figur 5: Designere kan oprette en prototype ved hjælp af udviklingssættet 410331P3161 mosaic-X5 ved hjælp af en række forskellige tilslutninger, herunder Ethernet, COM-porte eller USB 2.0, eller ved hjælp af et SD-hukommelseskort. (Billedkilde: Septentrio)
Figur 5: Designere kan oprette en prototype ved hjælp af udviklingssættet 410331P3161 mosaic-X5 ved hjælp af en række forskellige tilslutninger, herunder Ethernet, COM-porte eller USB 2.0, eller ved hjælp af et SD-hukommelseskort. (Billedkilde: Septentrio)
Sættet bruger mosaic-X5's intuitive webbruger-grænseflade til nem betjening og overvågning, så designere kan styre modtagermodulet fra enhver mobilenhed eller computer. Web-grænsefladen bruger letlæselige kvalitetsindikatorer til at overvåge modtagerens drift.
Designere kan skabe en prototype ved at integrere mosaic dev-kit ved hjælp af en af de følgende forbindelser: Ethernet, COM-porte, USB 2.0, SD-hukommelseskort.
GNSS-modul med integreret antenne
Til designere af applikationer, der kan drage fordel af brugen af et GNSS-modul med en integreret antenne, tilbyder Würth Elektronik modulet 2614011037000 Erinome-I-modulet med et højtydende system-on-chip (SoC) (Figur 6). Modulet understøtter GPS-, GLONASS-, Galileo- og BeiDou GNSS-konstellationerne og leveres med en integreret antenne på toppen, hvilket forenkler hardwareintegration og forkorter time-to-market. Modulet, inklusive den integrerede antenne, måler 18 mm x 18 mm.
 Figur 6: 2614011037000 Erinome-I er et komplet GNSS-modul med et højtydende GNSS SoC plus en integreret antenne. (Billedkilde: Würth Elektronik)
Figur 6: 2614011037000 Erinome-I er et komplet GNSS-modul med et højtydende GNSS SoC plus en integreret antenne. (Billedkilde: Würth Elektronik)
Modulet indeholder også TCXO, RF-filter, low-noise forstærker (LNA) og seriel flash-hukommelse.
Würth tilbyder også evalueringskortet 2614019037001 (EVB) til Erinome-I (Figur 7). EVB'en kan også benyttes som et referencedesign til integration af GNSS-modulet i en applikation. En USB-port kan bruges til at tilslutte EVB'en til en pc. Et stik med flere ben giver designere adgang til alle GNSS-modulets ben.
 Figur 7: Evalueringskortet 2614019037001 til Erinome-I (nær midten af kortet, med den integrerede antenne synlig i midten af modulet) fungerer også som referencedesign. (Billedkilde: Würth Elektronik)
Figur 7: Evalueringskortet 2614019037001 til Erinome-I (nær midten af kortet, med den integrerede antenne synlig i midten af modulet) fungerer også som referencedesign. (Billedkilde: Würth Elektronik)
Würth Elektronik Navigation and Satellite Software (WENSS) er et simpelt pc-værktøj til at interagere med Erinome-I GNSS-modulet ved hjælp af et UART-interface. Den understøtter:
- Kontrol af EVB-drift
- Bidirektionel kommunikation med Erinome-I-modulet
- Evaluering af Erinome-I's funktioner og muligheder
- Kendskab til Erinome-I protokoller, sætninger og kommandoer
- Konfiguration af Erinome-I uden kendskab til protokollerne
- Parsing af sætninger og kommandoer, der anvendes af Erinome-I
WENSS gør det nemt at evaluere positioneringsapplikationer uden avanceret viden. Erfarne udviklere kan også bruge WENSS til mere avancerede konfigurationer.
Konklusion
Nøjagtig og pålidelig positionering opnås bedst ved at anvende flere konstellationer med tilhørende korrektionsteknologi. Der er tale om komplekse systemer, men designere kan henvende sig til færdigbyggede GNSS-moduler, tilhørende udviklingskits og miljøer for hurtigt og effektivt at sammenligne muligheder og implementere positionsbaserede funktioner og tjenester.
Anbefalet læsning
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.